Control for HRI
Control engineering is an inevitable part of every field in robotics and human-robot interaction is not an exception. Control itself is a really broad field of engineering with different applications and it has so many different branches such as optimal control, robust control, adaptive control, nonlinear control and etc. Also, modern control sometimes it has a really powerful connection with reinforcement learning, deep learning and game theory. Here, we are going to introduce some of these subcategories with so many applications in HRI. Return Home Page
Impedance Control
Impedance Control was first introduced by MIT professor, Nevill Hogan, in 1985 and it is still a useful high level control method in physical human robot interactions. Impedance control is an approach to dynamic control relating force and position. It is often used in applications where a manipulator interacts with its environment and the force position relation is of concern.
 |
|---|
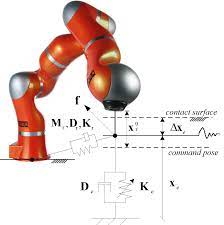
| *Fig1: Impedance control often models the contact force and interactions between manupulator and its environment as a mass-spring-damper system |
in Impedance Control we often consider a desired trajectory for our state variables and using that desired trajectory and the modeled mass-spring system as a control law, we close the control loop and calculate the force that we need to force control our system:
 |
|---|
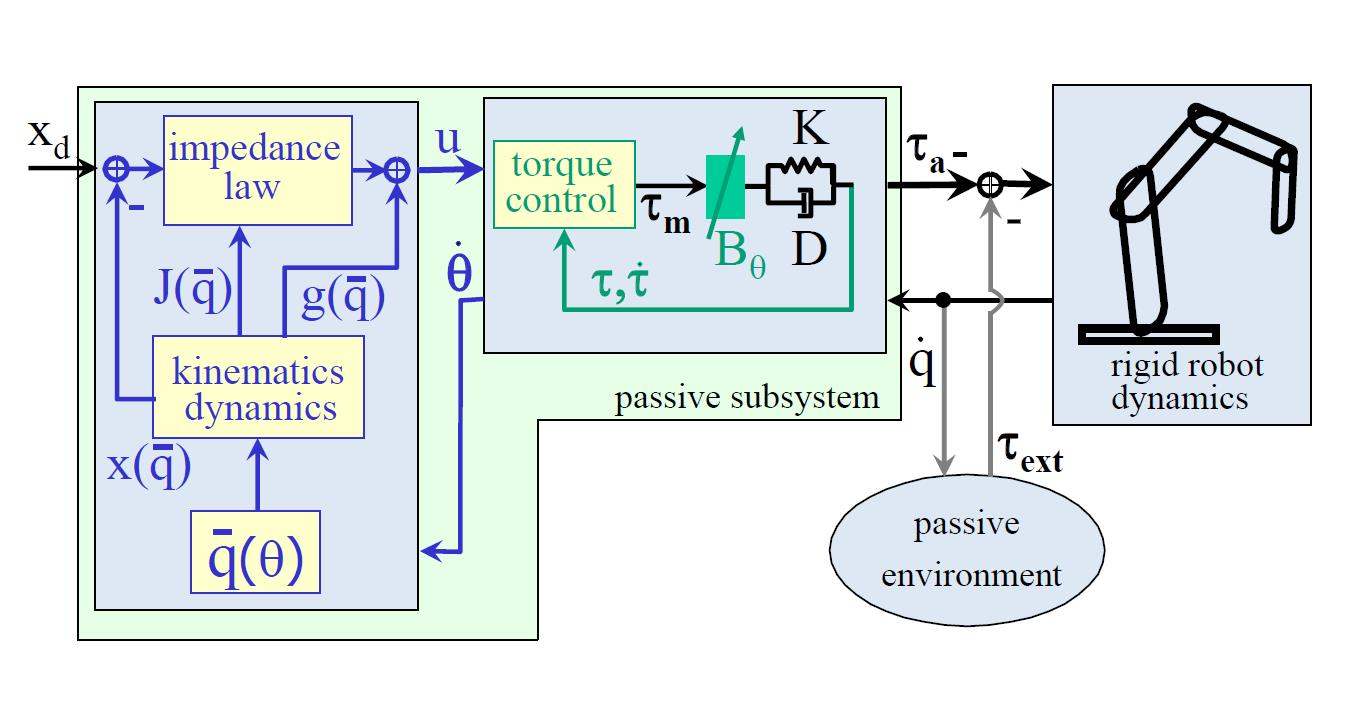
| *Fig2: a complete control loop for impedance control |

### General Resources For Impedance Control
- Impedance control: An approach to manipulation: Part II—Implementation, Nevill Hogan
Concept or Subtopic 1
(EXAMPLE: Nash equilibrium solutions)
(ADD: description of concept or subtopic)
Sample Projects
(ADD: RISE Code/Github link and description)
(ADD: or in text example/walkthrough)
Additional Reading
- (ADD: Article)
- (ADD: Article)
- (ADD: Article)
Concept or Subtopic 2
(EXAMPLE: Pareto optimality)
(ADD: description of concept or subtopic)
Sample Projects
(ADD: RISE Code/Github link and description)
(ADD: or in text example/walkthrough)
Additional Reading
- (ADD: Article or resource)
- (ADD: Article or resource)
- (ADD: Article or resource)